首次接入指南
首次接入和配置
本指南将引导您完成 nonebot-adapter-yunhu 在 Nonebot 中的首次接入和配置。
1. 前置要求:公网访问
云湖平台通过 Webhook 将事件(如消息、成员变动等)推送给您的机器人。
因此,在开始之前,您必须确保 Nonebot 实例能够被公网访问。
TIP
这意味着您需要具备以下条件之一:
- 拥有一个公网 IPv4 或 IPv6 地址。
- 使用内网穿透服务(如 frp, Ngrok, Cloudflare Tunnel 等)将您的本地 Nonebot 服务暴露到公网。
具体的公网部署方法多样,本指南不详细展开。
请根据您的实际网络环境选择合适的方案。
2. 在云湖平台创建机器人
下面教程以 云湖 Windows 版客户端 演示
访问 云湖官网 ,下载对应客户端。
注册并登录账号后,进入设置页面,创建一个新的机器人。

3. 获取机器人凭证
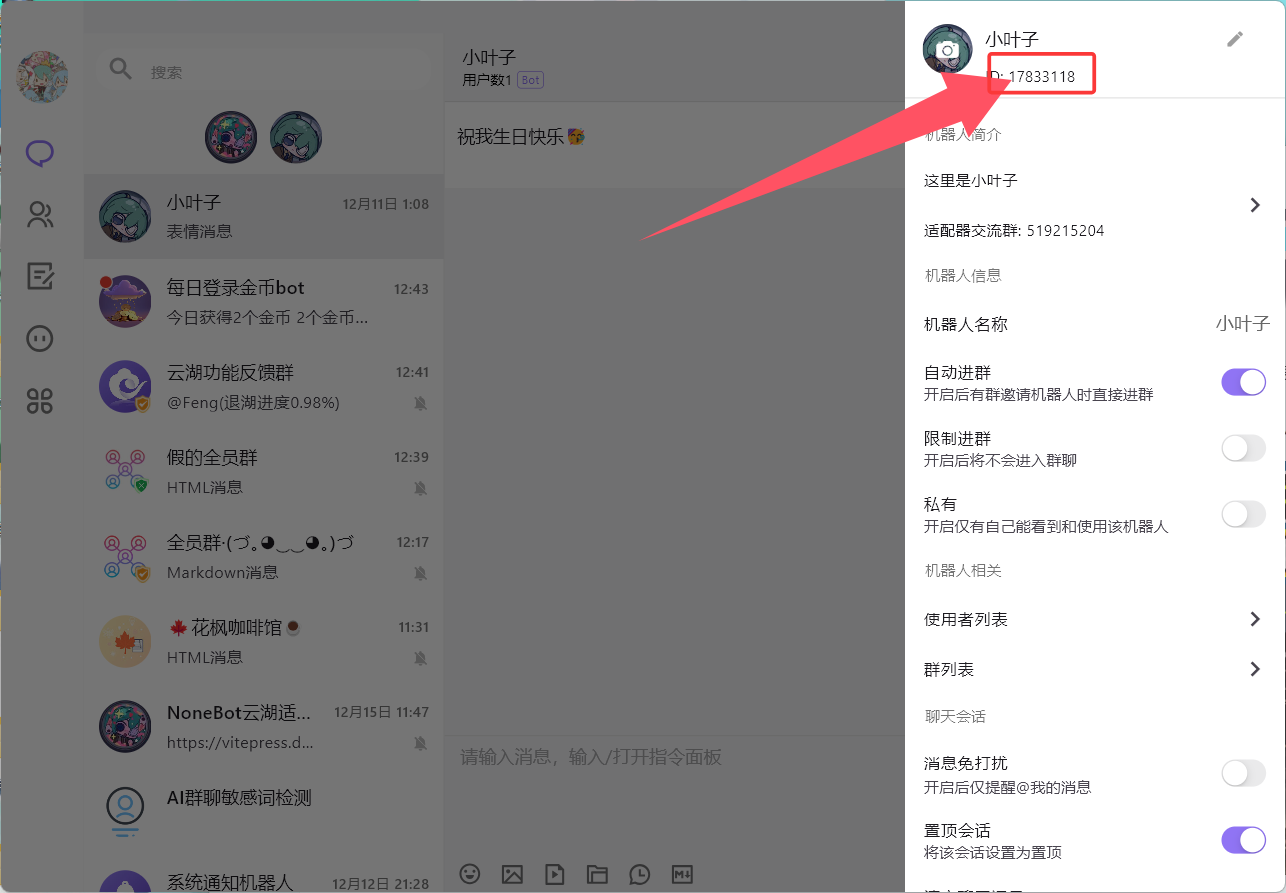
下面需要复制机器人账号的两个信息:ID、Token。
- 打开云湖客户端,在与机器人的聊天对话页面,复制机器人的账号 ID:
- 机器人 ID (app_id):这是您机器人的唯一标识。
- 打开官网控制台,复制机器人的 Token:
- 机器人 Token:这是与云湖 API 通信的密钥。

4. 配置 Nonebot 适配器
在你的 Nonebot 运行目录使用命令安装 nonebot-adpater-yunhu 适配器。
使用 nb-cli 安装
bash
nb adapter install nonebot-adapter-yunhu使用 pip 安装
bash
pip install nonebot-adapter-yunhu使用 nb-cli 创建全新 Bot 项目并安装
bash
nb create在适配器选择菜单找到 nonebot-adapter-yunhu 并选择
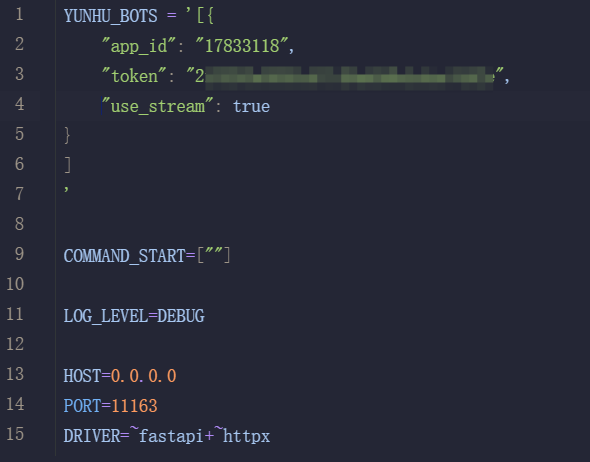
然后打开配置文件(一般是.env.prod),将上一步获取的 机器人 ID 和 Token 填入对应的配置项中。
WARNING
如果你是手动安装的适配器,请打开bot.py文件,导入并激活适配器
标准bot.py文件
python
import nonebot
from nonebot.adapters.yunhu import Adapter as YunhuAdapter # 导入云湖适配器
nonebot.init()
driver = nonebot.get_driver()
driver.register_adapter(YunhuAdapter) # 激活云湖适配器
# nonebot.load_builtin_plugins("echo") # 激活内置 echo 测试插件
nonebot.load_plugins("plugins") # 加载 plugins 文件夹下的插件
nonebot.run()5. 确认订阅地址
WARNING
注意 此步骤务必使用公网地址访问!
- 确认订阅地址:将您的 Nonebot 公网访问地址与上一步配置的
app_id组合成完整的 Webhook URL。- 若未配置端口,则默认为
8080 - 例如,如果您的公网域名是
http://1.2.3.4,并且app_id配置为123,那么完整的订阅地址就是http://1.2.3.4:8080/yunhu/123。
- 若未配置端口,则默认为
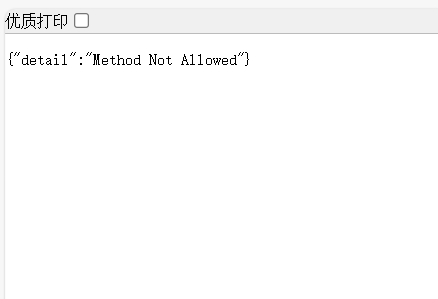
- 打开浏览器访问订阅地址:
- 如果你可以访问看到
{"detail":"Method Not Allowed"}页面,则说明配置成功!
- 如果你可以访问看到
6. 配置 Webhook 和事件订阅
回到云湖平台的机器人后台,进行以下配置:
配置订阅地址:假设您的订阅地址为
http://1.2.3.4:8080/yunhu/123。订阅事件:根据您的需求,勾选需要接收的事件类型。
- 为了确保机器人能正常响应消息,「消息事件」 是必须订阅的。

7. 测试连接
完成以上所有配置后,您可以对机器人进行一次简单的测试,以验证连接是否成功。
- 私聊 您的机器人,发送任意消息。
- 如果您的 Nonebot 控制台输出了对应的消息,则说明机器人已正常接收消息。
如果机器人没有响应,请检查以下几点:
- Nonebot 服务是否正常运行?
- 公网地址和 Webhook 路径是否正确?
- 云湖后台的事件订阅是否已开启?
- 检查 Nonebot 的控制台日志,确认是否有来自云湖的请求或任何错误信息。
关于「无公网 IP 订阅」的说明
目前,云湖平台的事件订阅机制强制要求一个可公网访问的 Webhook 地址。
关于未来是否支持如 WebSocket 等长连接方式,您可以关注官方的讨论: